TMC2208 Stepper Motor Driver (with Heatsink) User’s Guide
1. Overview
- Driver IC: TMC2208 by Trinamic (Analog Devices).
- Motor Support: 2‑phase bipolar stepper motors.
- Features:
- Silent operation (StealthChop technology).
- Microstepping up to 256 microsteps.
- Current up to 2 A RMS per coil.
- UART interface for advanced configuration.
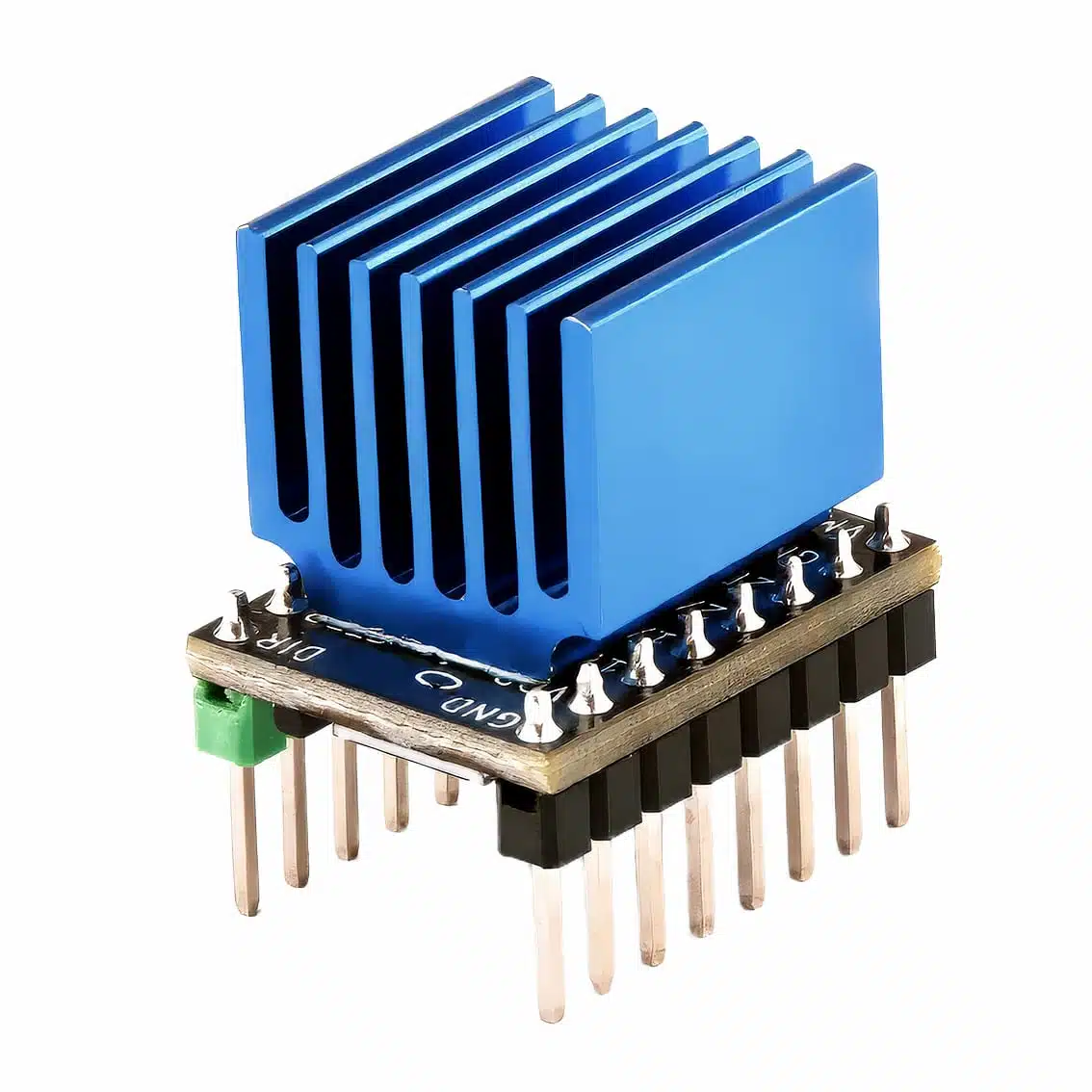
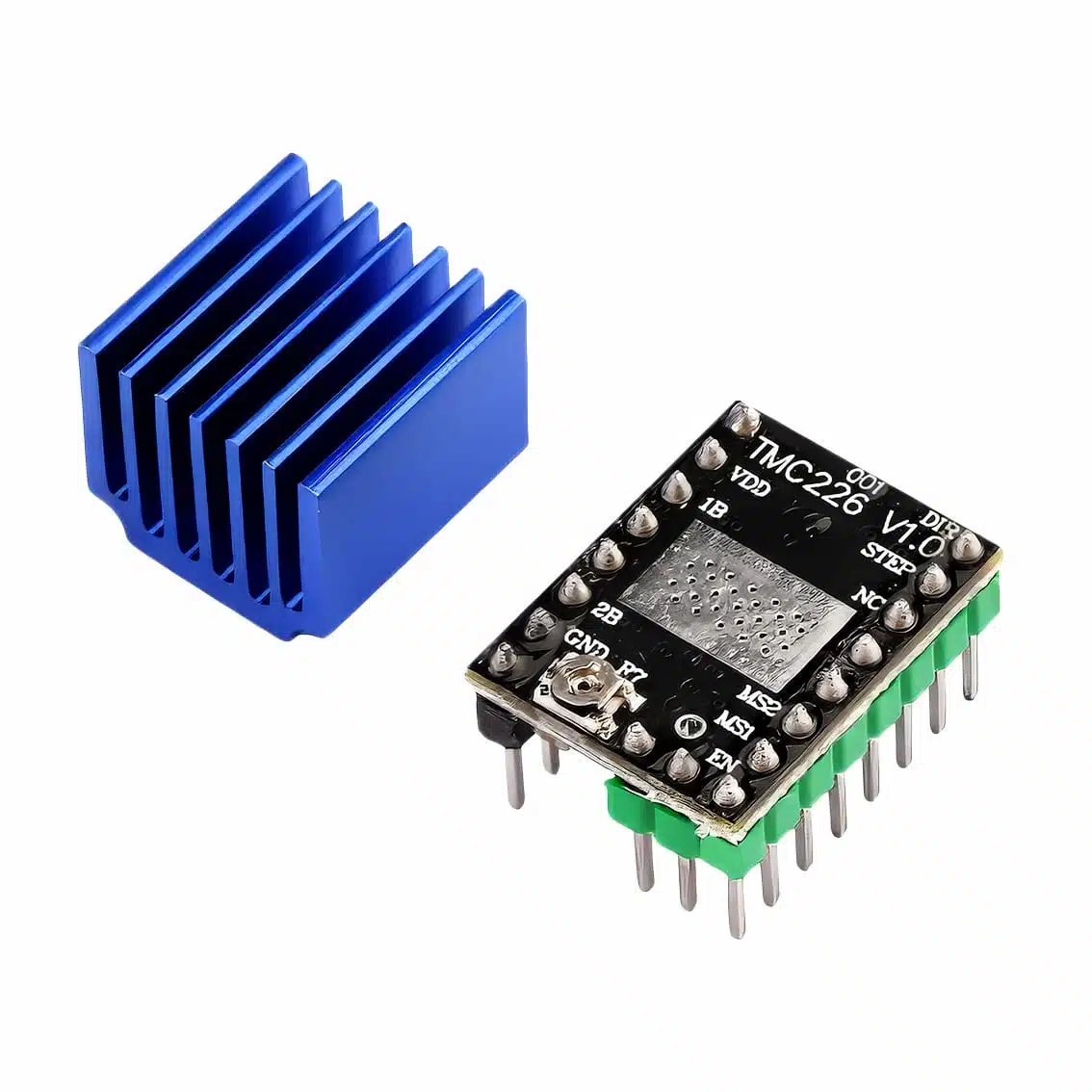
- Heatsink: Aluminum fin heatsink for thermal management.
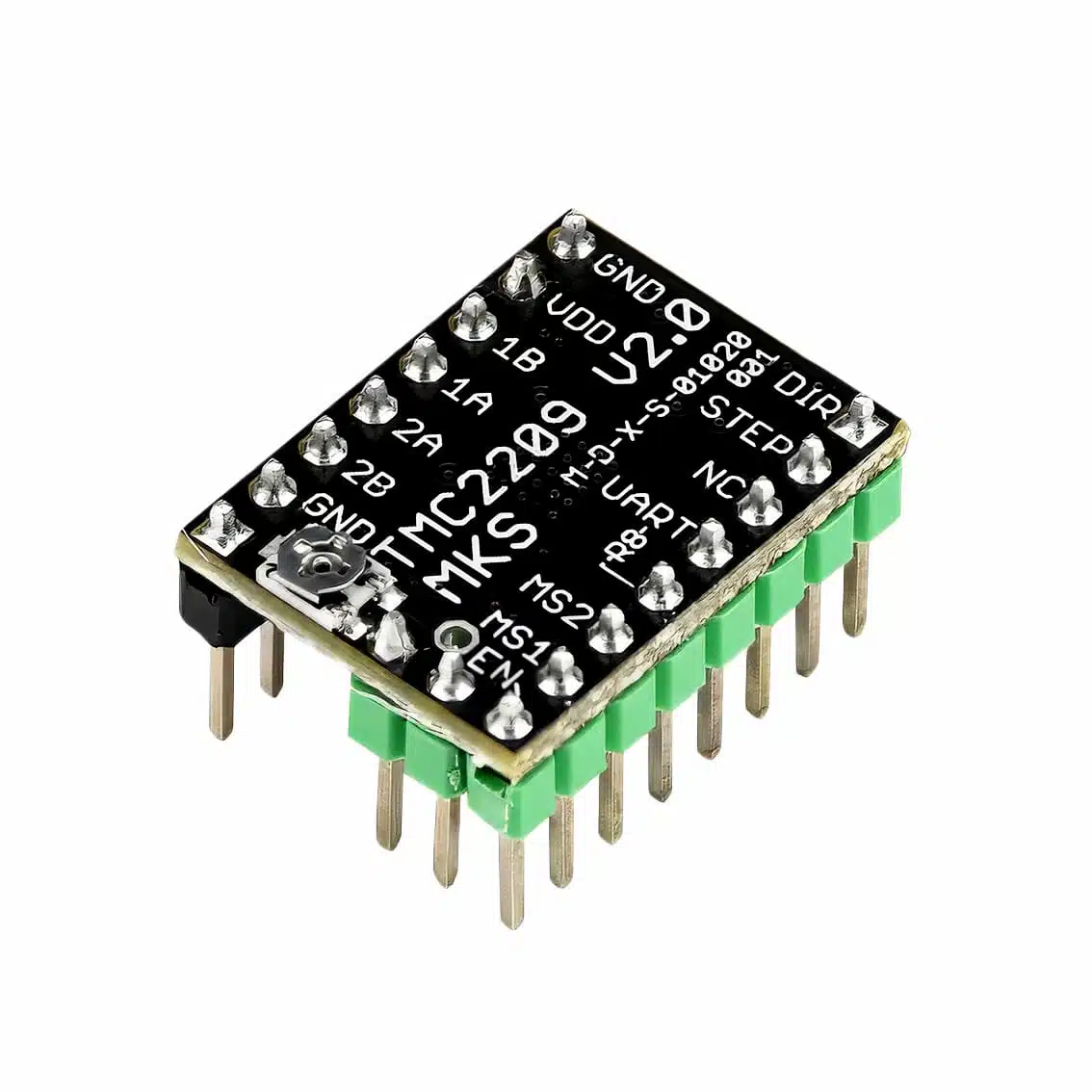
2. Pinout (Typical Module)
| Pin | Function | Description |
|---|---|---|
| EN | Enable | Active LOW, disables driver when HIGH |
| DIR | Direction | Sets motor rotation direction |
| STEP | Step pulse | Each pulse advances one microstep |
| MS1/MS2 | Microstep select | Hardware microstep configuration |
| UART | Serial config | Advanced tuning (optional) |
| VDD | Logic supply | 3.3–5 V |
| GND | Ground | |
| 1A, 1B | Motor coil A terminals | |
| 2A, 2B | Motor coil B terminals |
3. How It Works
- The driver energizes motor coils in sequence to rotate the stepper motor.
- STEP pin: Each rising edge = one microstep.
- DIR pin: Sets clockwise or counter‑clockwise rotation.
- Microstepping: MS1/MS2 or UART can set resolution (e.g., 1/16, 1/32, up to 1/256).
- Current control: Adjustable via onboard potentiometer or UART.
- Heatsink: Prevents overheating during continuous operation.
4. Wiring Example (Arduino UNO)
TMC2208 Pin → Arduino Pin
EN → D8
DIR → D5
STEP → D6
VDD → 5V
GND → GND
1A/1B → Motor coil A
2A/2B → Motor coil B
5. Arduino Code Example
#define EN 8
#define DIR 5
#define STEP 6
void setup() {
pinMode(EN, OUTPUT);
pinMode(DIR, OUTPUT);
pinMode(STEP, OUTPUT);
digitalWrite(EN, LOW); // enable driver
}
void loop() {
digitalWrite(DIR, HIGH); // set direction
for(int i=0; i<200; i++) { // 200 steps = 1 revolution (depends on motor)
digitalWrite(STEP, HIGH);
delayMicroseconds(500);
digitalWrite(STEP, LOW);
delayMicroseconds(500);
}
delay(1000);
}
6. Applications
- 3D printers (quiet stepper control).
- CNC machines (precise positioning).
- Robotics (smooth motor movement).
- Educational kits (demonstrating microstepping).
7. Best Practices
- Always attach the heatsink for continuous operation.
- Adjust current limit to match your motor (too high = overheating, too low = missed steps).
- Use StealthChop for silent operation, SpreadCycle for higher torque.
- Ensure proper cooling and airflow in enclosed projects.
- Avoid hot‑plugging motors — connect coils before powering.