WeMos D1 Mini I²C Dual Motor Driver Shield (TB6612FNG) User’s guide

WeMos D1 Mini I²C Dual Motor Driver Shield (TB6612FNG)
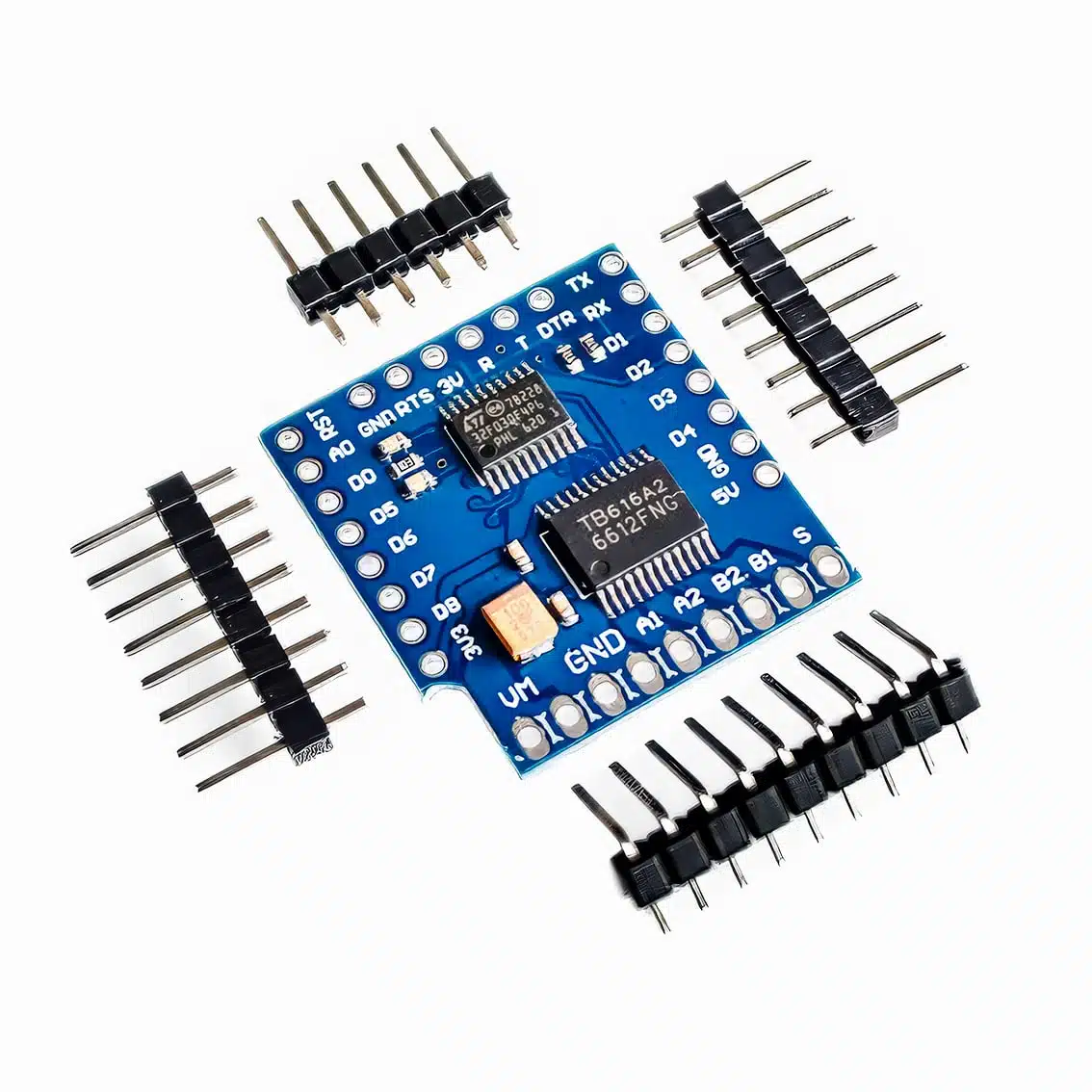
1. Overview
- Driver IC: TB6612FNG (modern replacement for L293D, more efficient).
- Motors Supported: 2 DC motors (independent) or 1 stepper motor.
- Control Interface: I²C (address configurable via jumpers).
- Stackable Shield: Fits directly on WeMos D1 Mini.
- Voltage: Logic at 3.3 V (ESP8266 native), motor supply up to 15 V.
- Current Capacity: ~1.2 A continuous per channel, 3.2 A peak.
2. Pinout & Connections
The shield uses I²C pins of the D1 Mini:
| Function | D1 Mini Pin | Notes |
|---|---|---|
| SDA | D2 | I²C data line |
| SCL | D1 | I²C clock line |
| VM | External motor supply (up to 15 V) | |
| GND | Ground | |
| A+/A– | Motor A terminals | |
| B+/B– | Motor B terminals |
The shield draws logic power from the D1 Mini (3.3 V). Motors require a separate supply connected to VM + GND.
3. How It Works
- The TB6612FNG has two H‑bridge channels.
- Via I²C commands, you set motor direction (forward/reverse), speed (PWM duty cycle), and braking.
- The shield firmware/library handles I²C communication, so you don’t need to manually toggle GPIO pins.
4. Arduino/ESP8266 Code Example
Install the WEMOS_Motor_Shield library (available via Arduino Library Manager).
#include <WEMOS_Motor.h>
// Motor shield at I2C address 0x30
Motor M1(0x30, _MOTOR_A, 1000); // freq = 1kHz
Motor M2(0x30, _MOTOR_B, 1000);
void setup() {
M1.begin();
M2.begin();
}
void loop() {
M1.speed(100); // Motor A forward, speed 100/255
M2.speed(-100); // Motor B reverse, speed 100/255
delay(2000);
M1.stop();
M2.stop();
delay(1000);
}
5. Applications
- Robotics: drive two DC motors for wheels.
- DIY controllers: motorized sliders or knobs.
- Educational kits: demonstrate I²C motor control.
- Stepper motor projects: use both channels together.
6. Best Practices
- Always use a separate motor power supply (VM) — don’t power motors from the D1 Mini’s 5 V pin.
- Keep motor wiring short to reduce noise.
- If stacking multiple shields, configure unique I²C addresses via jumpers.
- Use PWM frequencies around 1 kHz for smooth motor control.