// defines pins numbers
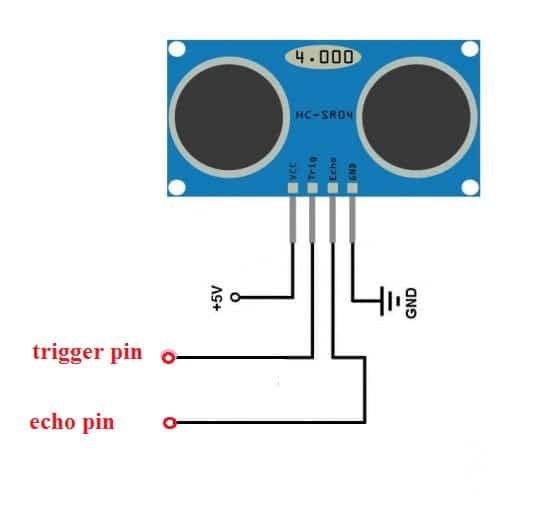
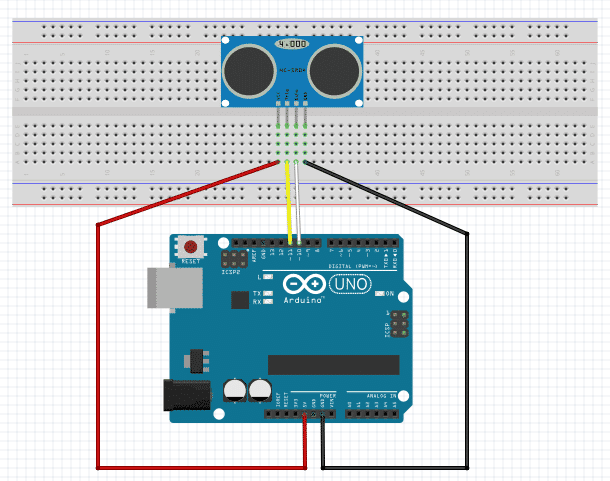
int trigPin = 10;
int echoPin = 11;
// defines variables
long duration;
int distance;
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600); // Starts the serial communication
}
void loop() {
// Clears the trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // trigPin to HIGH
delayMicroseconds(10); // Wait 10 micro seconds
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Reads the echoPin
// Calculating the distance
distance = duration * 0.035/2;
// Prints the distance on the Serial Monitor
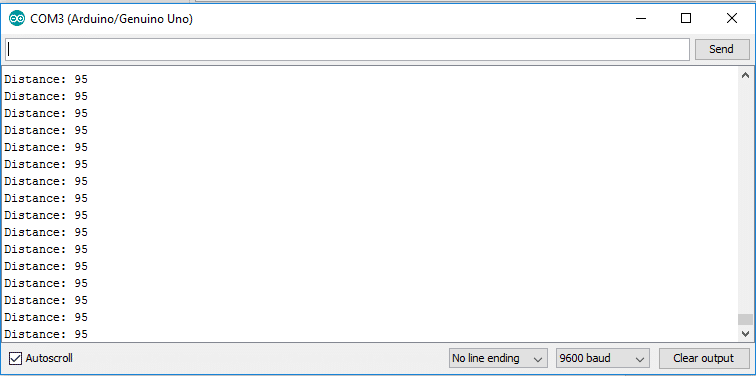
Serial.print("Distance: ");
Serial.println(distance);
}