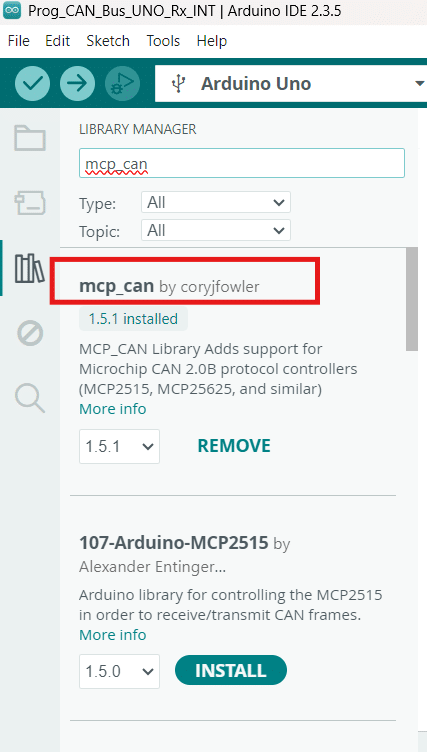
#include <SPI.h>
#include <mcp_can.h>
const int SPI_CS_PIN = 10;
MCP_CAN CAN(SPI_CS_PIN);
void setup() {
Serial.begin(115200);
while (CAN_OK != CAN.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ)) {
Serial.println("CAN init failed");
delay(100);
}
CAN.setMode(MCP_NORMAL);
Serial.println("CAN init OK!");
}
void loop() {
byte data[] = {0x01, 0x02, 0x03, 0x04, 0x01, 0x02, 0x03, 0x04}; // Example payload
CAN.sendMsgBuf(0x100, 0, 8, data); // ID: 0x100, Standard frame, 8 bytes
Serial.println("Message sent");
delay(1000);
}